|
退出
首页
产品
TopSim.SYS 复杂系统多学科联合仿真试验平台
TopSim.Code 多学科协同设计仿真平台
TopSim. Engine 仿真引擎
TopSim.SysPrime 体系架构建模软件
TopSim.Link 分布式支撑平台
TopSim. Cloud 仿真云管理平台
解决方案
方案论证
设计优化
生产制造
测试试验
使用保障
媒体中心
关于鼎成
公司概况
联系我们
加入我们
成立于
2019
年
致力于成为业界领先的数字化产品和技术服务提供商。
华如科技与雷曼光电签署COB小间距显示产品战略合作协议
华如科技与雷曼光电签署COB小间距显示产品战略合作协议
登录
登录
手机短信登录
立即注册
|
忘记密码?
登录
获取验证码
登录
用户密码登录
注册
获取验证码
立即注册
注册
您已注册成功!
立即登录
建设中,敬请期待!
案例分析|基于XSIM的空地攻防对抗仿真
发布时间:2020-04-13
来源:华如科技
在军事仿真领域中,红蓝双方进行攻防对抗是必不可少的。本文主要介绍防空导弹拦截现代战斗机的攻防对抗作战仿真,利用XSimStudio可扩展仿真平台开发了某型防空导弹系统仿真模型、现代战斗机以及机动组件和智能规避任务模型,较为真实地模拟了现代战斗机面对防空导弹拦截时的机动规避能力,检验了现代战斗机的战术战法和使用策略,为防空导弹拦截现代战斗机的作战效能分析提供仿真支撑。
1
仿真模型设计
1.1 突防飞机模型
1.1.1 飞机实体模型
飞机的飞行仿真是开发建立具备产生实时的飞行状态、姿态和系统状态数据功能的实体仿真平台。根据飞行仿真需求,该模块包含:
1)
飞机气动力模型,提供仿真飞机气动特性;
2)
大气模型,获得实时大气数据,用以进行飞行解算;
3)
发动机模型,模拟发动机高度速度特性,加减速特性以及耗油特性;
4)
动力学与导航模型,仿真飞机飞行高度、速度、性能特性,获得实时位置姿态信息。
1.1.2 飞机隐身模型
(目标特征模型)
仿真飞机的隐身能力采用RCS组件来实现。RCS目标特征组件模型主要从不同的频段、不同的视角描述实体的RCS,仿真的功能点主要包括:
1)
考虑不同极化方式下的RCS仿真;
2)
仿真对不同频段、不同视角下的RCS;
3)
可仿真实体滚轴轴对称和横向对称两种对称方式下的RCS仿真;
4)
可仿真对RCS进行插值计算。
Tips:
仿真平台支持雷达、可见光、红外、声学等目标特征建模,可以同时为实体附加多种目标特征模型,由探测方根据探测机制获取到对应的目标特征值。
1.1.3 飞机机动模型
飞机机动模型可以进行一些简单的机动动作,如稳盘、俯冲、爬升和平飞加减速机动外,还需进行一些复杂的组合式机动。仿真的飞机机动模型主要设计了连续“S”形机动、半滚倒转机动和“蛇浪”等三种复杂的机动模型。
1.1.3.1 连续“S”形机动
水平连续转弯是一种多次改变飞机飞行方向的水平面内转弯机动。该机动使导弹制导系统不断改变跟踪指令,导弹不能按理想的弹道飞行,脱靶量增大,从而降低导弹的命中率。机动参数为:转弯个数-num、转弯坡度-phicmd、目标航向角-psaicmd。仿真流程见图1:
(图1 连续急转弯机动仿真流程)
1.1.3.2 半滚倒转机动
半滚倒转机动是飞机滚转180°成倒飞状态,接着在垂直面内迅速做曲线运动并绕横轴旋转成正飞状态的机动飞行。半滚倒转机动可快速降低高度、获得速度,并改变航向180°。机动参数为:过载限制、滚转角速度限制-RollRateLimit、俯仰角速度限制-PitchRateLimit。仿真流程见图2:
(图2 半滚倒转机动仿真流程)
1.1.3.3 “蛇浪”机动
“蛇浪”机动是飞机同时在垂直空间和水平空间内不规则地改变高度和航向的机动飞行。机动设置:转弯个数-num、转弯坡度-phicmd、目标航向角-psaicmd、过载限制-Nlimit、滚转角速度限制-RollRateLimit、俯仰角速度限制-PitchRateLimit。仿真流程见图3:
(图3 蛇浪机动仿真流程)
Tips:
空间运动仿真是典型的连续时间系统,仿真平台支持对连续时间、离散事件以及连续离散混合系统的仿真。对于空间运动仿真,可以建立运动学或动力学的机动模型,机动模型的积分步长或者计算步长可以按需以及保证模型计算收敛所需的周期,仿真平台不限制步长的大小(但会影响仿真运行速度)。同时,空间位置姿态信息(TSPI)的消费者还可能需要对TSPI进行插值以进一步提高数据精度。除物理运动过程仿真之外,机动还应对运动/驾驶等操作过程进行建模,例如本节的三种战术机动、本文后续内容中的导弹机动。实际上机动过程是由机动指令和机动执行两大部分组成,机动执行一般是数量相对有限的动力学、运动学模型,体现的主要是装备的物理能力,机动指令是包括有人驾驶运动平台的驾驶或战术操作、制导武器弹药实体的自动驾驶仪等,更多地体现了战术意图和智能性。
1.1.4 机动任务模型
机动任务模型用于模拟控制飞机的机动过程,在仿真建模时主要对以下功能点进行仿真模拟:
1)
当飞机受到敌方武器威胁时,控制机动组件开始进行机动;
2)
控制飞机机动后的动作:返回基地或向目标机动。
(图4 机动任务能力模型运行流程图)
1.2
防空导弹模型
1.2.1 防空导弹实体模型
1.2.1.1 主要功能
防空导弹实体模型的主要功能点包括:
1)
具有发射约束条件参数和发射约束检测接口,包含是否可拦截目标和目标位置或拦截点位置是否在发射区内两项检测;
2)
在水平方向上支持三种发射朝向模式:朝向发射平台前方、朝向拦截点、朝向目标,俯仰方向支持垂直和非垂直发射两种朝向模式;
3)
具有发射可靠性参数,具有发射可靠性检测接口;
4)
具有飞行可靠性参数,可对导弹飞行过程中多个关键事件执行的可靠性进行模拟;
5)
具有引爆可靠性参数,可模拟导弹未成功引爆的概率事件;
6)
界面可选择使用目标真实信息或目标航迹信息作为模型制导用目标信息。
1.2.1.2
运行流程
防空导弹实体的运行流程如下图所示:
(图5 防空导弹实体模型运行流程图)
1.2.2 防空导弹机动模型
1.2.2.1 主要功能
防空导弹机动组件模型的主要功能点包括:
1)
弹道计算采用质点运动学模型加比例导引,导航比界面可设置;
2)
具有最大法向过载参数,约束导弹机动能力;
3)
可自动调整运动计算积分步长,根据弹目相对运动情况调整积分步长,降低因步长问题导致错过目标的发生概率;
4)
可自动检测弹目交会以及碰地,并触发引爆;
5)
可自动检测导弹飞行时间超过最大飞行时间触发引爆或自毁的异常情况。
1.2.2.2 运行流程
防空导弹机动组件的运行流程如下图所示:
(图6 防空导弹机动组件模型运行流程图)
1.2.3 防空制导雷达模型
1.2.3.1 主要功能
防空制导雷达模型,用于模拟在防空作战过程中为制导武器提供精确制导信息的能力。防空制导雷达主要考虑了典型目标RCS,典型目标探测概率,虚警率以及方位角测量精度,俯仰角测量精度等性能参数,并建立空间探测包络,对模型进行包络覆盖检查。在仿真建模时完成了对以下功能点的模拟:
1)
考虑地形遮蔽,包括受地球曲率影响的雷达视距限制和地形起伏造成的遮蔽;
2)
可根据雷达战术指标的目标信噪比计算得到探测概率;
3)
考虑探测距离和探测高度限制,根据用户设置的探测距离门限以及高度门限判断目标是否可被探测;
4)
通过当前探测概率与典型目标探测概率进行比较,并在考虑随机因素后,检查当前目标是否可以被探测到;
5)
具备在接收到目标引导信息指令后,根据引导信息给定的目标位置,更新天线指向的能力。
1.2.3.2 运行流程
防空制导雷达流程如下图所示:
(图7 防空制导雷达流程图)
Tips:
包括雷达在内的各种探测类装备/设备模型,肩负为各战场实体提供战场感知信息的重要作用,是OODA过程仿真的第一步。探测类模型消费目标TSPI、目标特征信息,生成探测数据(点迹、航迹等),探测数据既可以被自身平台进行关联、融合处理形成情报,进而上传或分发,也可以直接上传由更高一级实体进行多传感器数据融合。此外需要注意的是,探测过程和情报融合过程的计算占据了体系对抗仿真中计算量的相当大比例,必须对模型精心设计以保证效率,平台提供了高效的空间实体查找功能,支持多种查找条件,可以快速地为探测模型从成千上万个实体中找出探测分为范围内的所有实体,减少后续处理时间。(在探测类模型的系列过滤条件中,越简单的条件应该放在前面,保证计算量最小)
1.2.4
防空作战任务模型
1.2.4.1 主要功能
防空作战任务能力模型用于模拟火力单元对空中目标进行拦截的作战过程,在仿真建模时主要对以下功能点进行仿真模拟:
1)
若当前火力单元可自主威胁评估,则当火力单元进入部队一等战备状态时,开始对目标进行威胁评估;
2)
具备根据目标态势,实时对威胁目标进行排序的能力;
3)
具备对自身处理目标条件进行检查的能力;
4)
具备处理目标能力,支持根据上级下发的目标信息中,指定的对目标最大使用武器数量,来限制作战过程中对目标使用武器数量,支持根据武器发射规则,限定对于特定目标使用的武器类型、发射类型和发射规则,其中发射规则包括发射武器直到目标死亡、发射指定数量的武器;
5)
具备根据当前处理目标情况,控制制导雷达开、关机,以使其为武器发射提供情报支持,同时令其开机持续时间尽可能短;
6)
具备接收上级指挥所下发的目标分配消息,生成指令目标并加入目标列表的能力;
7)
能够在接到上级指挥所下发的目标分配消息后,回告上级确认目标分配消息;
8)
对于指令目标,能够在与目标交战完成后,向上级指挥所上报完成目标处理消息。
1.2.4.2 运行流程
防空作战任务能力模型的运行流程如图8所示:
( 图8 防空作战任务能力流程图)
Tips:
防空作战任务实际上是对防空作战指挥控制C2的建模仿真,包括指挥自动化以及指挥员在内的建模。任务模型受空情变化触发相应的行为,是典型的离散事件系统。除了将整个过程分为威胁评估、目标分配等多个阶段之外,还需要显性刻画阶段时延(即OODA中每个环节的时延)以逼真反应武器系统的时间特性。平台支持多种行为建模方法,例如行为树、状态机、战术任务等基于规则的方法,也可以训练并集成基于人工神经网络的机器学习类行为模型。
1.3
模型小结
仿真平台提供的是面向对象智能体建模仿真方法,所有战场实体都可以设计为智能体,具备自身的装备能力和行为能力,能够模拟有人或无人作战平台执行各类战术任务,进行自主决策。
同时平台对智能体建模提供了组件化建模机制,将战场实体合理拆分为多个/类组成部分,分别建模并进行组装以形成战场实体/智能体。这样就最大限度提升了模型的复用性,例如本文中的飞机机动模型,可以模拟红蓝各方多型飞机的空中运动,减少了模型开发重复工作。
此外平台还支持参数化建模,即给同一个仿真程序模型配置不同性能参数以模拟不同型号装备,一方面进一步提升模型复用性,另一方面也是对涉密数据或不确定数据的保护和支持。平台设计了自动化机制,为参数建模提供一整套自动化解决方案,最大限度减少了建模人员开发工作量。
2
仿真示例
2.1 仿真目的
红方:仿真某型防空导弹对现代战斗机的拦截能力。
蓝方:在面对防空导弹攻击时,仿真现代战斗机采取不同的战术机动规避摆脱防空导弹打击的能力。
2.2 想定规划
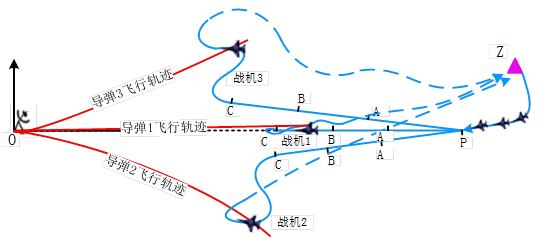
某型防空导弹武器系统部署在战场O点,现代战斗机的机场部署在相对防空阵地东北向的Z点,水平航迹规划图见图9:
(图9 三架战机航迹规划图)
2.3 战术动作设置
3架现代战斗机从阵地起飞,飞向P点后,进入各自航线。防空导弹武器系统分别发射防空导弹拦截战机。
战机1进行半滚倒转机动,摆脱导弹或导弹自毁后后回机场。
战机2进行“蛇浪”机动,以大坡度背向导弹转弯,并先下降,再拉起跃升,摆脱导弹或导弹自毁后后回机场。
战机3进行连续“S”形机动,转角达到一定角度后向相反方向转弯,如此反复直至摆脱导弹或导弹自毁后后回机场。
2.4
仿真运行过程
1)
蓝方3架现代战斗机从Z机场起飞,集合出航;红方阵地的制导雷达开机搜索目标,如图10所示:
(图10 飞机起飞进入预定航迹图)
2)
飞机到达P点后,解散进入各自的航线,对地导阵地展开攻击,如图11所示:
(图11 战机进入预定航迹攻击地导阵地图)
3)
飞机进入防空导弹拦截射程,地导阵地发射导弹拦截飞机,如图12所示:
(图12 防空导弹拦截飞机仿真图)
4)
飞机发现被导弹锁定后,采取预设的机动动作进行规避,战机1进行半滚倒转机动,战机2进行“蛇浪”机动,战机3进行连续“S”形机动。如图13所示:
(图13 飞机进行不同的机动规避导弹拦截)
5)
飞机摆脱导弹的拦截,返回机场,如图14所示:
(图14 机动规避成功)
6)
飞机被击毁,如图15所示:
(图15 飞机被击毁)
2.5 仿真分析结果
通过对以上场景进行大量的仿真,并对结果数据进行分析,得出以下结论:
1)
防空导弹拦截现代战斗机的攻防作战过程中,当飞机进行不同机动时,会不同程度地降低导弹的杀伤效果。
2)
现代战斗机在面对防空导弹的拦截时,采用连续“S”形机动、半滚倒转机动和“蛇浪”机动是有效的,可以较大幅度地提高飞机的生存力。
3
结束语
基于XSimStudio仿真平台制作的防空导弹与现代战斗机进行攻防对抗仿真系统和想定场景,通过大样本仿真实验与分析评估,能够较快、较好地分析现代战斗机与防空导弹武器系统之间的攻防对抗能力,检验飞机突防战术战法,评估防空导弹武器系统拦截飞机能力,对现代飞机和防空导弹武器系统的作战效能评估和作战使用研究都具有较好的支撑作用。
上一条:
“虚拟战疫”:精准探寻最优解
下一条:
实训即实战 | 华如防务研发新一代实兵交战系统
首页
>
媒体中心
>
正文